处理数据样本的代码可能会混乱且难以维护;理想情况下,希望数据集代码与模型训练代码解耦,以获得更好的可读性和模块化。PyTorch提供了两个数据基元torch.utils.data.DataLoader 和 torch.utils.data.Dataset,它们允许使用预加载的数据集以及自己的数据。Dataset存储样本及其对应的标签,DataLoader在Dataset周围包装了一个可迭代对象,以方便访问样本。
PyTorch提供了许多预加载的数据集(FashionMNIST),它们是torch.utils.data.Dataset的子类,并实现了特定于特定数据的函数。它们可以用于模型的原型和基准测试。可以在这里找到它们:图像数据集(Image Datasets),文本数据集(Text Datasets)和音频数据集(Audio Datasets)。
加载数据
这是一个如何从TorchVision加载Fashion-MNIST数据集的示例。Fashion-MNIST是Zalando的文章图像数据集,包含60,000个训练示例和10,000个测试示例。每个示例包含一个28×28灰度图像和10个类别之一的关联标签。
用以下参数加载FashionMNIST数据集:
root存储训练/测试数据的路径,
train指定训练或测试数据集,
download=True如果根目录下不可用,则从互联网上下载数据。
transform和target_transform指定了特征变换和标签变换
import torch
from torch.utils.data import Dataset
from torchvision import datasets
from torchvision.transforms import ToTensor
import matplotlib.pyplot as plt
training_data = datasets.FashionMNIST(
root="data",
train=True,
download=True,
transform=ToTensor()
)
test_data = datasets.FashionMNIST(
root="data",
train=False,
download=True,
transform=ToTensor()
)
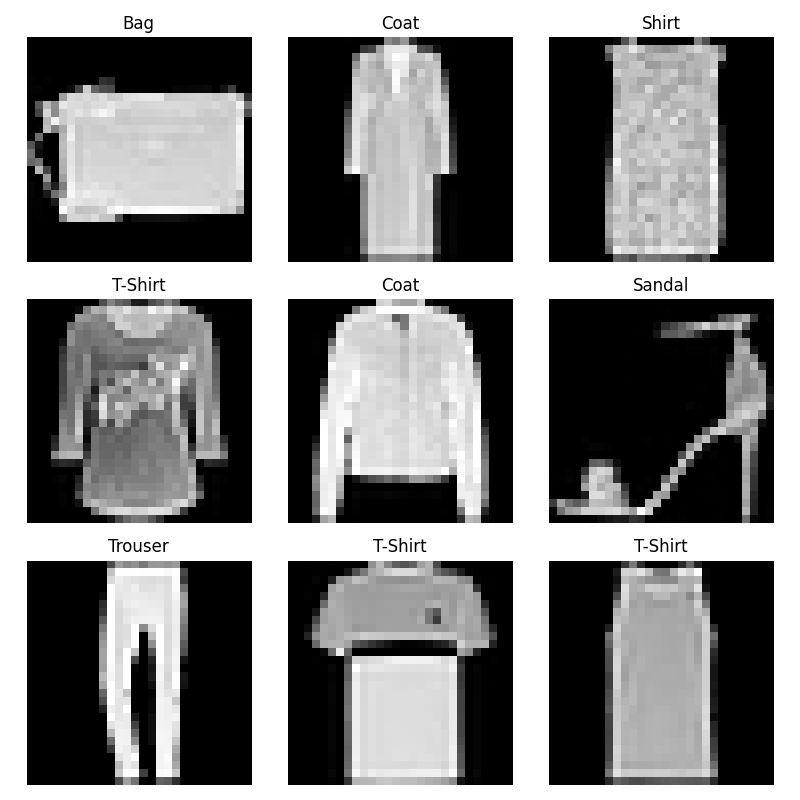
迭代和可视化数据集
可以像列表一样手动索引数据集:training_data[index]。使用matplotlib来可视化训练数据中的一些样本。
labels_map = {
0: "T-Shirt",
1: "Trouser",
2: "Pullover",
3: "Dress",
4: "Coat",
5: "Sandal",
6: "Shirt",
7: "Sneaker",
8: "Bag",
9: "Ankle Boot",
}
figure = plt.figure(figsize=(8, 8))
cols, rows = 3, 3
for i in range(1, cols * rows + 1):
sample_idx = torch.randint(len(training_data), size=(1,)).item()
img, label = training_data[sample_idx]
figure.add_subplot(rows, cols, i)
plt.title(labels_map[label])
plt.axis("off")
plt.imshow(img.squeeze(), cmap="gray")
plt.show()
为文件创建自定义数据集
一个自定义数据集类必须实现三个函数:__init__、__len__和__getitem__。FashionMNIST图像存储在目录img_dir中,它们的标签单独存储在CSV文件annotations_file中。
import os
import pandas as pd
from torchvision.io import read_image
class CustomImageDataset(Dataset):
def __init__(self, annotations_file, img_dir, transform=None, target_transform=None):
self.img_labels = pd.read_csv(annotations_file)
self.img_dir = img_dir
self.transform = transform
self.target_transform = target_transform
def __len__(self):
return len(self.img_labels)
def __getitem__(self, idx):
img_path = os.path.join(self.img_dir, self.img_labels.iloc[idx, 0])
image = read_image(img_path)
label = self.img_labels.iloc[idx, 1]
if self.transform:
image = self.transform(image)
if self.target_transform:
label = self.target_transform(label)
return image, label
__init__
__init__函数在实例化Dataset对象时只运行一次。初始化包含图像、标注文件和两个transforms。标注文件如下:
tshirt1.jpg, 0
tshirt2.jpg, 0
……
ankleboot999.jpg, 9
def __init__(self, annotations_file, img_dir, transform=None, target_transform=None):
self.img_labels = pd.read_csv(annotations_file)
self.img_dir = img_dir
self.transform = transform
self.target_transform = target_transform
__len__
__len__函数返回数据集中的样本数量。
def __len__(self):
return len(self.img_labels)
__getitem__
__getitem__函数从给定索引idx的数据集中加载并返回一个样本。根据索引,它确定图像在磁盘上的位置,使用read_image将其转换为张量,从csv数据中检索相应的标签。对它们调用transform函数(如果适用),并返回元组中的张量图像和相应的标签。
def __getitem__(self, idx):
img_path = os.path.join(self.img_dir, self.img_labels.iloc[idx, 0])
image = read_image(img_path)
label = self.img_labels.iloc[idx, 1]
if self.transform:
image = self.transform(image)
if self.target_transform:
label = self.target_transform(label)
return image, label
使用DataLoaders为训练准备数据
Dataset每次检索数据集一个样本的特征和标签。在训练模型时,通常希望以“minibatches”的方式传递样本,在每个epoch重新shuffle数据以减少模型过拟合,并使用Python的多进程处理来加速数据检索。DataLoader是一个可迭代对象,它将这种复杂性抽象为一个简单的API。
from torch.utils.data import DataLoader
train_dataloader = DataLoader(training_data, batch_size=64, shuffle=True)
test_dataloader = DataLoader(test_data, batch_size=64, shuffle=True)
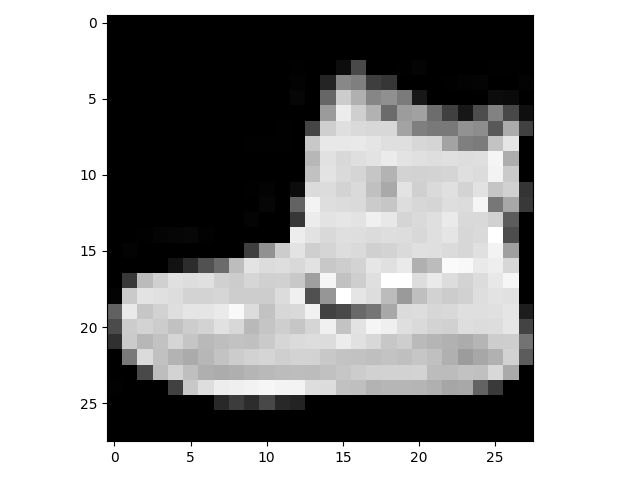
遍历DataLoader
已经将该数据集加载到DataLoader中,并可以根据需要迭代该数据集。下面的每次迭代都会返回一批train_features和train_labels(分别包含batch_size=64个特征和标签)。因为指定了shuffle=True,所以在遍历完所有batches后,数据会被打乱(为了更细粒度地控制数据的加载顺序,可以看一下Samplers)。
# Display image and label.
train_features, train_labels = next(iter(train_dataloader))
print(f"Feature batch shape: {train_features.size()}")
print(f"Labels batch shape: {train_labels.size()}")
img = train_features[0].squeeze()
label = train_labels[0]
plt.imshow(img, cmap="gray")
plt.show()
print(f"Label: {label}")
输出:
Feature batch shape: torch.Size([64, 1, 28, 28])
Labels batch shape: torch.Size([64])
Label: 9